
Система контроля устойчивости предназначена для поддержания устойчивости и управляемости автомобиля за счет раннего выявления и устранения критической ситуации. С 2011 года стало обязательным оснащение новых автомобилей системой контроля устойчивости в США, Канаде и странах ЕС.
Система позволяет автомобилю оставаться в пределах траектории, заданной водителем, в различных режимах движения (ускорение, торможение, движение по прямой, поворот и свободный ход).
В зависимости от производителя различают следующие наименования систем устойчивости автомобиля:
- ESP (Electronic Stability Program) на большинстве автомобилей Европы и Америки;
- ESC (электронный контроль устойчивости) на автомобилях Honda, Kia, Hyundai;
- DSC (Dynamic Stability Control) на автомобилях BMW, Jaguar, Rover;
- DTSC (Dynamic Stability Traction Control) на автомобилях Volvo;
- VSA (система стабилизации автомобиля) на автомобилях Honda, Acura;
- VSC (Vehicle Stability Control) на автомобилях Toyota;
- VDC (Vehicle Dynamic Control) на автомобилях Nissan, Infiniti, Subaru.
Устройство и принцип работы системы стабилизации рассмотрены на примере наиболее распространенной системы ESP, выпускаемой с 1995 года.
Система стабилизации является превосходной системой активной безопасности и включает в себя антиблокировочную тормозную систему (ABS), систему распределения тормозных усилий (EBD), антипробуксовочную систему (ASR).
Компоненты ESP (рис. 1) составляют основные компоненты ABS. Устройство и принцип работы АБС.
Ключевое различие между ESP и ABS заключается в том, что ESP постоянно контролирует ускорение автомобиля, чтобы удовлетворить желания водителя, выраженные в рулевом колесе, в то время как ABS активируется только при торможении.
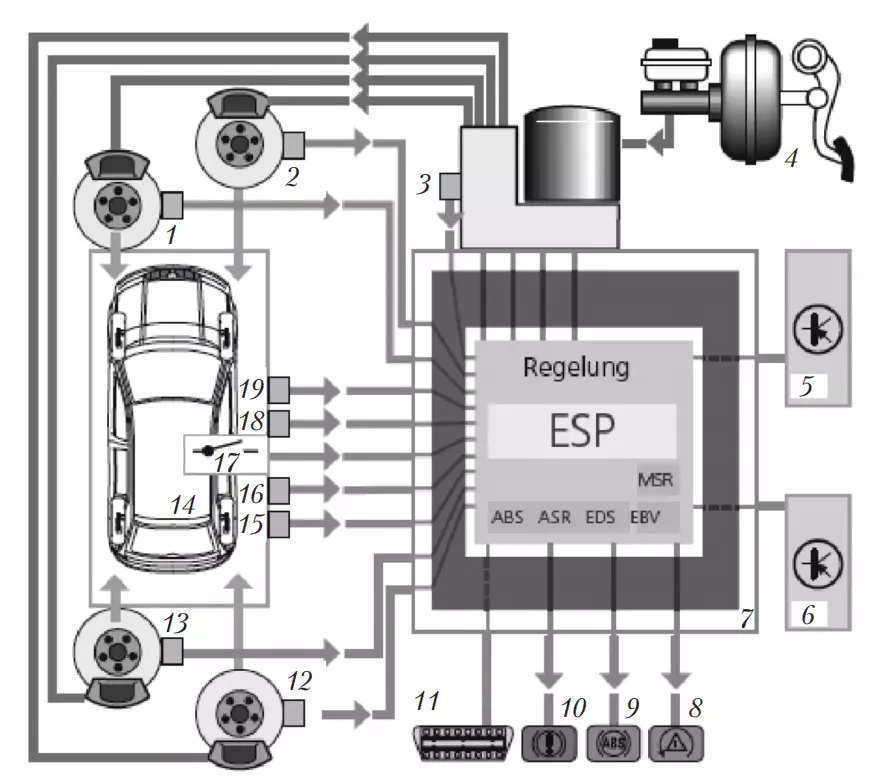
Рис. 1. Общая схема электронной системы стабилизации коробки передач ESP (на примере Skoda Fabia): 1, 2, 12, 13 — датчики частоты вращения колес; 3 — датчик давления в тормозной системе; 4 — активный усилитель тормозов; 5 — ЭБУ с работой двигателя; 6 — ЭБУ управления коробкой передач (только на моделях с автоматической коробкой передач); 7 — гидроагрегат с блоком управления ABS EDL / TCS / ESP; 8 — контрольная лампа TCS / ESP; 9 — контрольная лампа АБС; 10 — сигнальная лампа двухконтурной тормозной системы и стояночного тормоза; 11 — диагностический разъем; 14 — система динамики автомобиля и поведения водителя; 15 — выключатель стоп-сигнала; 16 — датчик угла поворота рулевого колеса; 17 — кнопочный переключатель систем TCS / ESP; 18 — датчик рыскания; 19 — датчик бокового ускорения
Алгоритм работы системы зависит от режима движения автомобиля. Система стабилизации должна распознавать начало заноса транспортного средства и предотвращать его. Он определяет желаемое направление по углу поворота, а датчики на всех колесах измеряют скорость вращения. На основе этих данных блок управления рассчитывает фактическую траекторию движения, которая более 25 раз в секунду сравнивается с желаемым направлением. При вождении с системой ESP учитываются три степени свободы автомобиля на поверхности дороги (направление продольного и поперечного движения и вращения вокруг вертикальной оси автомобиля). Если блок управления ESP рассчитывает, что ускорение при разгоне достигло критических значений и возникли условия потери устойчивости транспортного средства (занос) и поперечного пробуксовывания колес переднего и / или заднего мостов), система начинает тормозить колеса, которые пробуксовывают.
Входные датчики записывают определенные параметры автомобиля и преобразуют их в электрические сигналы. Система динамической стабилизации с помощью датчиков оценивает действия водителя и параметры движения транспортного средства. Блок управления ESP принимает сигналы от датчиков и формирует управляющие воздействия на исполнительные механизмы управляемых систем активной безопасности. При необходимости блок использует информацию от ЭБУ системы управления двигателем и ЭБУ АКПП).
В то же время датчики угловой скорости измеряют смещение транспортного средства вокруг вертикальной оси и его поперечное ускорение. Если значения различаются, система немедленно реагирует на ситуацию без какого-либо вмешательства водителя, снижая мощность двигателя и восстанавливая устойчивость автомобиля. Если этого недостаточно, ESP дополнительно тормозит каждое колесо. Возникающее в результате вращение колеса препятствует проскальзыванию, и автомобиль остается на безопасном пути.
Оцениваются сигналы от датчика 16 угла поворота рулевого колеса, датчика давления в тормозной системе 3 и от ЭБУ через работу двигателя 5. Помимо скорости автомобиля, в расчеты также входят необходимые характеристики коэффициентов сцепление шин с дорожным покрытием. Эти параметры оцениваются на основе сигналов, полученных от датчиков 1, 2, 12, 13 скорости вращения колес, датчика 19 бокового ускорения, датчика 18 рыскания и датчика тормозного давления 3. Датчик бокового ускорения информирует блок управления о боковом движении автомобиля, в то время как датчик рыскания сигнализирует о тенденции к заносу. Затем вычисляется момент вокруг вертикальной оси, необходимый для приближенного приведения параметров фактического состояния к параметрам требуемого состояния.
Стабилизация движения автомобиля с помощью системы ESP достигается за счет:
- тормозить некоторые колеса;
- изменение крутящего момента двигателя;
- изменение угла поворота передних колес (при наличии активной системы рулевого управления);
- изменение степени демпфирования амортизаторов (при наличии адаптивной подвески).
Информация от датчиков анализируется блоком управления для расчета направления движения, определяемого рулевым управлением, и для распознавания поведения транспортного средства. Система ESP определяет, какое колесо следует ускорить или затормозить и насколько резко следует изменить крутящий момент двигателя, а также необходимость включения блока управления коробкой передач (на моделях с автоматической коробкой передач).
Цикл управления заканчивается, когда результат положительный, и система управления продолжает отслеживать поведение транспортного средства. Если устойчивость движения не восстанавливается, испытательный цикл повторяется. Активация цикла регулирования сопровождается миганием светового индикатора системы стабилизации.
Гидравлическая блокировка системы ABS используется для системы динамической стабилизации.
Определение наступления аварийной ситуации осуществляется путем сравнения действий водителя и параметров движения транспортного средства. Если действия водителя (желаемые параметры движения) отличаются от реальных параметров движения автомобиля, активируется система ESP.
Система тормозит колеса через гидромодулятор АБС, который создает давление в тормозной системе. Принцип работы алгоритма торможения аналогичен описанному. Одновременно (или раньше) двигатель получает команду уменьшить подачу топлива и, как следствие, уменьшить крутящий момент на колесах.
ESP отдельно выбирает тормозные силы для каждого колеса, так что результирующая тормозная сила противодействует моменту, который имеет тенденцию вращать автомобиль вокруг вертикальной оси и удерживать автомобиль на оптимальной траектории. Если автомобиль плохо поворачивает и сдвигает передние колеса наружу (недостаточная поворачиваемость) (рис. 2, а), ESP тормозит внутреннее заднее колесо. Если автомобиль пытается повернуть круче, чем необходимо, после заноса (избыточной поворачиваемости) сзади (рис. 2, б), ESP исправляет ошибку, притормаживая внешнее переднее колесо. Чтобы предотвратить занос автомобиля с задним приводом, ESP снижает частоту вращения двигателя. Благодаря этому возникает стабилизирующий момент сил, возвращающий машину на безопасную траекторию.
В случае угрозы опрокидывания автомобиль стабилизируется за счет уменьшения поперечного ускорения, что достигается за счет достаточно сильного торможения передних колес и одновременного уменьшения крутящего момента двигателя.
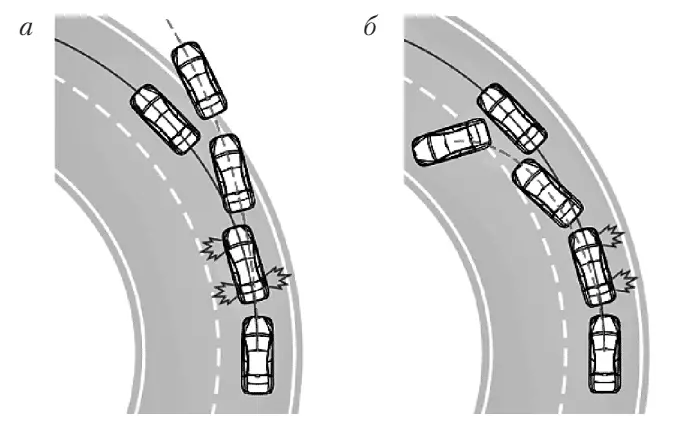
Рис. 2. Траектория прохождения поворотов с ESP (сплошная линия) и без ESP (пунктирная линия): а — недостаточная поворачиваемость; б — избыточная поворачиваемость
Изменить крутящий момент двигателя в системе ESP можно:
- изменение положения дроссельной заслонки;
- отсутствие впрыска топлива;
- пропускать импульсы зажигания;
- изменение угла опережения зажигания;
- отмена переключения передач в АКПП;
- перераспределение крутящего момента между осями (при наличии полного привода).
Блок управления ESP также взаимодействует с системой управления двигателем и автоматической коробкой передач (через соответствующие блоки управления). Помимо приема сигналов от этих систем, ЭБУ формирует управляющие воздействия на элементы системы управления двигателем и автоматической коробкой передач.
2. Дополнительные системы курсовой устойчивости автомобиля
В конструкции системы контроля устойчивости могут быть реализованы следующие дополнительные функции (подсистемы): система стабилизации на поворотах, система распределения крутящего момента, система контроля устойчивости прицепа, система предотвращения опрокидывания, предотвращение столкновений, система повышения эффективности тормозов во время движения обогрев, система отвода влаги с тормозными дисками и т д. В этом параграфе обсуждаются наиболее важные и часто используемые системы (остальные в 5.7).
Все эти системы, как правило, не имеют собственных структурных элементов, а являются программным расширением системы ESP.
Контроль торможения на поворотах (CBC). Опасные ситуации при торможении на поворотах могут проявляться в избыточной или недостаточной поворачиваемости и вызывать занос автомобиля. Это связано с тем, что при торможении на повороте скорость рыскания транспортного средства может достигать такого значения, которое вызывает описанные выше явления. Чтобы исправить этот эффект рыскания, функция CBC отслеживает тормозное давление, чтобы создать корректирующий противодействующий крутящий момент. Таким образом CBC улучшает курсовую устойчивость автомобиля при торможении на поворотах.
В случае экстренного торможения на повороте автомобиля без CBC способность передних колес воспринимать поперечные (управляющие) усилия значительно снижается. Автомобиль движется с поворотом передней оси к внешнему краю поворота. На автомобилях с системой CBC в случае недостаточной поворачиваемости система снижает тормозное давление на передние колеса. В результате колеса снова могут воспринимать управляющие силы, и автомобиль сохраняет определенное направление движения.
Для работы CBC не требуются никакие дополнительные блоки или компоненты, в нем используются существующие устройства системы ABS, например. CBC — это просто плагин для системы ABS. Особенностью CBC является то, что он способен обнаруживать опасные ситуации при торможении на поворотах без датчиков вращения или бокового ускорения, только на основании данных об угловой скорости вращения колес. При обнаружении пробуксовки колес, чего еще недостаточно для активации ABS, активируется CBC. Путем дальнейшей обработки этих данных блок управления ABS может распознавать возникновение недостаточной или избыточной поворачиваемости и соответствующим образом регулировать тормозное давление. Как и при нормальной работе ABS, регулирование давления происходит в три этапа: «удержание давления», «сброс давления» и «повышение давления». В результате автомобиль стабилизируется, а управляемость сохраняется. Система тормозит колеса через гидромодулятор АБС, который создает давление в тормозной системе (см. Рис. 14).
Системы распределения крутящего момента. Эти системы делятся на электронную блокировку дифференциала EDS (Elektronische Differenzialsperre) и ATTS (Active Torque Transfer System).
Когда автомобиль поворачивается, на его колеса действуют две основные силы: тяговое усилие, которое ускоряет автомобиль, и поперечное тяговое усилие, которое поворачивает автомобиль. Они связаны с силой трения в зоне контакта. Сила трения, в свою очередь, ограничена ограниченными характеристиками сцепления шины и поверхности.
Учитывайте распределение сил на колесах при повороте автомобиля (рис. 3).
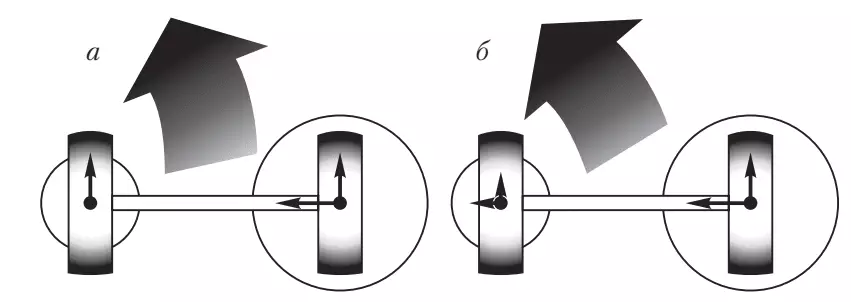
Рис. 3. Распределение сил на колесах автомобиля при повороте: а — нормальный автомобиль; б — автомобиль с активной системой распределения крутящего момента
При повороте из-за действия центробежной силы внутреннее колесо разгружается, т.е это в худших условиях сцепления. В результате общая сила тяги и поперечной силы, которую может поглотить колесо, также уменьшится, и, следовательно, у него будет меньше возможностей для ускорения и поворота автомобиля. Система ATTS перераспределяет крутящий момент между ведущими колесами, снимая избыточное тяговое усилие с внутреннего колеса и передавая его на более нагруженное внешнее колесо. В результате слегка нагруженная внутренняя шина, лишенная чрезмерного сцепления, имеет больше шансов реализовать необходимую поперечную силу на повороте.
Увеличение крутящего момента на внешнем колесе создает дополнительный крутящий момент, который имеет тенденцию «втягивать» автомобиль в повороты.
Электронная блокировка дифференциала EDS предназначена для предотвращения пробуксовки ведущих колес при трогании с места, ускорения на скользкой дороге, движения по прямой и поворота путем торможения ведущих колес. Система названа по аналогии с соответствующей дифференциальной функцией.
EDS активируется, когда одно из ведущих колес проскальзывает и тормозит вращающееся колесо, тем самым увеличивая крутящий момент на нем. Поскольку ведущие колеса соединены симметричным дифференциалом, крутящий момент на другом колесе также увеличивается (с лучшим сцеплением.
В основе системы EDS лежит антиблокировочная тормозная система. В отличие от ABS, EDS предназначена для самовоздушивания тормозной системы. Для реализации этой функции используется обратный насос и два электромагнитных клапана (на каждое из ведущих колес), входящие в состав гидроагрегата АБС. Это переключающий клапан и клапан высокого давления.
Система управляется соответствующим программным обеспечением в блоке управления ABS. Электронная блокировка дифференциала, как правило, является частью антипробуксовочной системы и работает в диапазоне скоростей от 0 до 80 км / ч.
ЭЦП работает циклически. Системный цикл состоит из трех фаз:
- повышенное давление;
- удержание давления;
- сброс давления.
Пробуксовка колес определяется путем сравнения сигналов датчиков скорости вращения колес. Затем блок управления закрывает переключающий клапан и открывает клапан высокого давления. Для создания давления в контуре тормозного цилиндра ведущего колеса включается возвратный насос. Происходит повышение давления тормозной жидкости в контуре и торможение ведущего колеса.
Система тормозит колеса через гидромодулятор АБС, который создает давление в тормозной системе (см. Рис. 14).
Когда достигается необходимое тормозное усилие для предотвращения заноса, давление поддерживается на том же уровне. Это достигается отключением обратного насоса.
В конце прокрутки давление сбрасывается. В этом случае впускной и переключающий клапаны в цепи тормозного цилиндра ведущего колеса открыты.
При необходимости цикл ЭЦП повторяется. Mercedes ETS (Electronic Traction System) имеет аналогичный принцип работы.
Система активного распределения крутящего момента ATTS также улучшает управляемость и используется в полноприводных автомобилях. Например, рассмотрим системы активного распределения крутящего момента Honda и Mitsubishi.
Электронная система управления (рис. 4) включает датчики угла поворота рулевого колеса, поперечного и углового ускорения, скорости вращения колес, частоты вращения коленчатого вала и давления всасываемого воздуха, передаточного числа.
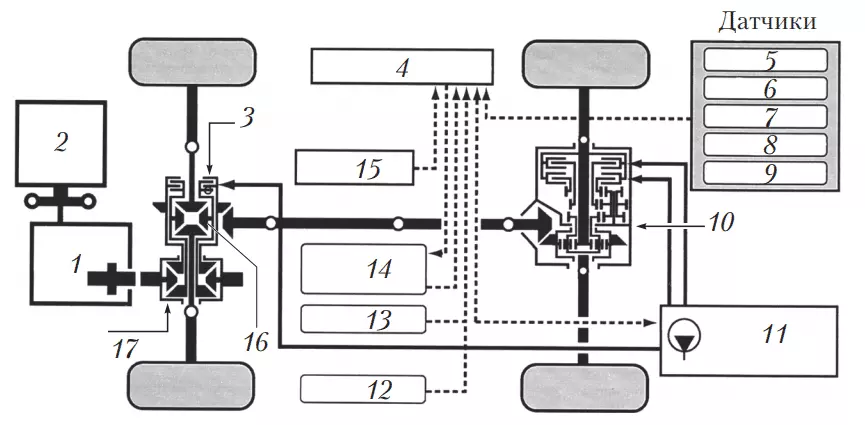
Рис. 4. Схема трансмиссии полноприводного автомобиля Mitsubishi Lancer Evolution VIII: 1 — коробка передач; 2 — двигатель; 3 — муфта блокировки межосевого дифференциала; 4 — дифференциалы БУ; 5 — датчик угла поворота рулевого колеса; 6 — датчик положения дроссельной заслонки; 7 — колесные датчики АБС; 8 — датчики продольного ускорения; 9 — датчики поперечного ускорения; 10 — задний активный дифференциал; 11 — гидронасос с гидроаккумулятором; 12 — лампа стоп-сигнала; 13 — датчик включения стояночного тормоза; 14 — индикатор переключения режимов: асфальт / гравий / снег; 15 — блок управления АБС; 16 — передний дифференциал; 17 — межосевой дифференциал (50:50)
Информация со всех датчиков отправляется в ЭБУ, который рассчитывает оптимальное распределение крутящего момента на колеса.
Кроме того, ЭБУ передает информацию в блок управления с дифференциалом для распределения момента между осями и задними колесами в соответствии с условиями движения. Перераспределяет от 30 до 70% момента на желаемую ось, на одно из задних колес — от 0 до 100%. В нормальных условиях до 70% крутящего момента передается на передние колеса. При более высоких ускорениях до 70% крутящего момента передается на заднюю ось, чтобы улучшить динамику ускорения и в то же время стабилизировать движение. При ускорении в поворотах почти 100% крутящего момента может передаваться на заднее внешнее колесо (рис. 5). Диаметрально противоположная картина возникает при снижении скорости на повороте дороги: крутящий момент будет передаваться на внутреннее колесо.
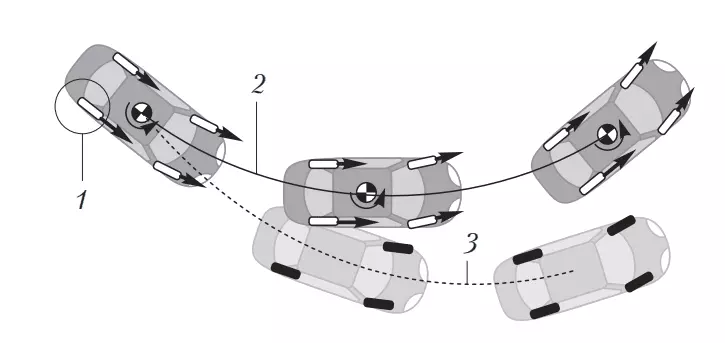
Рис. 5. Путь движения автомобиля с электронным приводом рулевых колес: 1 — максимальный крутящий момент; 2 — траектория движения автомобиля с электронным приводом рулевых колес; 3 — траектория движения автомобиля без электронного рулевого управления за рулем
Есть отличия в передаче фрикционных дисков ведущих колес. Mitsubishi использует в своих конструкциях электрогидравлический привод, а Honda — электромагнитный.
В дифференциале автомобилей Honda используются электромагнитные многодисковые муфты 4 (рис. 6). Каждое сцепление индивидуально передает крутящий момент на одно из задних колес, правое или левое. Встроенные электромагнитные соленоиды 3 изменяют положение сердечника магнита относительно его корпуса. В зависимости от условий движения блок управления дифференциалом определяет, какой ток приложить к магниту, тем самым сжимая пакеты пластинчатых клапанов и плавно изменяя распределение крутящего момента. Оба сцепления могут работать независимо друг от друга.
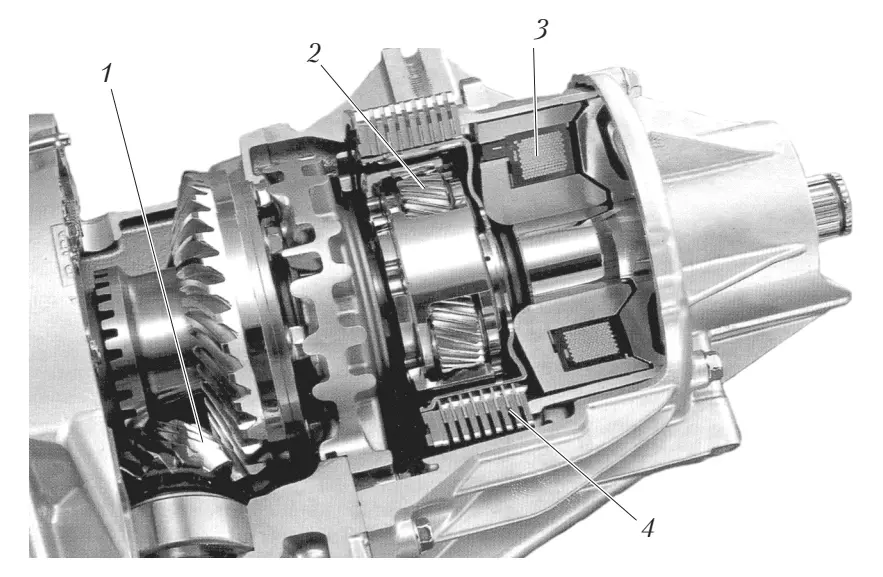
Рис. 6. Задний привод с электромагнитной муфтой: 1 — гипоидная ведущая шестерня; 2 — планетарная передача; 3 — соленоид; 4 — муфты многодисковые
Модули сцепления объединены с двумя собственными планетарными передачами.
Вместе с дифференциалом работает модуль ускорения с гидравлическим приводом (на рисунке не показан), который включает в себя планетарную передачу и передает крутящий момент на ведущую шестерню 1 гипоидной передачи. Этот модуль позволяет повысить надежность поведения автомобиля в крутых поворотах. В свою очередь, он принудительно «вращает» задние колеса. При прохождении поворота внешний путь заднего колеса смещен наружу от пути переднего колеса. При традиционной схеме трансмиссии внешнее заднее колесо вращается медленнее, чем переднее, что препятствует передаче полной мощности, в результате ухудшается управляемость и возникает риск заноса. Ускоритель решает эту проблему.
При движении по прямой планетарные передачи вращаются синхронно с карданным валом — частота вращения передних и задних колес одинакова. Когда автомобиль входит в поворот, гидравлическая трансмиссия через другой модуль сцепления приводит в движение планетарную передачу модуля ускорения, в то время как заднее колесо на нужной стороне «крутится» на оптимальной скорости.
Блок управления, обнаруживая сигналы, поступающие от датчиков, может определять стиль вождения. Когда автомобиль едет прямо, сцепления разомкнуты и планетарные шестерни системы вращаются без холостого хода, дифференциал равномерно распределяет крутящий момент от двигателя между ведущими колесами.
Если водитель поворачивает автомобиль, удерживая ногу на педали акселератора, реакция электронной системы управления будет отличаться от ситуации, когда автомобиль движется по инерции или тормозит по дуге. Одна из муфт частично или полностью блокируется с помощью исполнительного механизма, и крутящий момент на колесах изменяется, что позволяет перераспределять его до 80% от противоположного колеса.
При резком трогании с места полноприводные автомобили испытывают дефицит крутящего момента на колесах задней оси и избыточный крутящий момент на передней оси. Чтобы этого не произошло, система оснащена датчиком ускорения, который определяет, когда необходимо передать энергию на заднюю ось. В режиме тихой езды на передние колеса передается больший крутящий момент, что способствует более стабильному поведению автомобиля.
Система контроля устойчивости прицепа. Автомобилю с прицепом легче попасть в критическую ситуацию с точки зрения курсовой устойчивости. Даже опытному водителю не всегда легко вернуть контроль над начавшим движение грузовиком.
Боковой ветер, сдавленные гусеницы, быстрый поворот при объезде препятствий или слишком высокая скорость могут привести к раскачиванию прицепа вбок, особенно при движении под уклон. Раскачивание прицепа также передается тягачу (рис. 7).
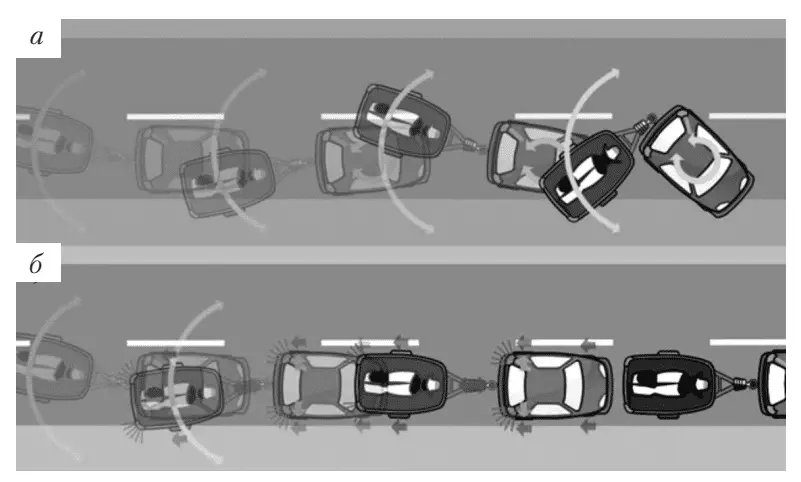
Рис. 7. Схема движения автомобиля с прицепом: а — с качелями; б — без колебаний
У буксирующего транспортного средства может возникать рыскание и боковое ускорение в зависимости от величины раскачивания и веса прицепа, что влияет на движение прицепа. Возвратно-поступательные колебания прицепа и тягача могут приобретать такие размеры, что весь тягач полностью потеряет курсовую устойчивость.
Для стабилизации прицепа система ESP дополнена усовершенствованным программным обеспечением, которое снижает риск такой аварийной ситуации. Во-первых, система стабилизирует прицеп, попеременно притормаживая колеса автомобиля. Если этого оказывается недостаточно, система начинает тормозить все колеса транспортного средства для стабилизации ситуации, а также через тормоз при опрокидывании колеса прицепа.
Функция стабилизации автопоезда не требует дополнительных датчиков для своей реализации и является просто программным расширением системы ESP. Он использует для своей работы только узлы и компоненты ESP.
Боковое ускорение и рыскание трактора регистрируются датчиками ESP и передаются в блок управления ABS / ESP. Полученные входные значения (скорость колеса, рыскание, поперечное ускорение, угол поворота, давление на педаль тормоза) сравниваются со стандартной характеристикой, хранящейся в блоке управления.
При превышении определенных предельных значений активируется функция стабилизации автопоезда. Чтобы лучше гасить возникающие вибрации и компенсировать рыскание, передние колеса автомобиля тормозятся попеременно. Таким образом, ESP предотвращает резонанс и увеличение амплитуды вибрации или блокировку оси транспортного средства или прицепа. Если этого недостаточно, все четыре колеса тормозятся за счет давления в тормозных контурах до тех пор, пока прицеп не перестанет раскачиваться.
При корректировке с помощью тормозов загораются стоп-сигналы, чтобы предупредить других участников дорожного движения, следующих за вами. Водителя теперь предупреждает загорающаяся контрольная лампа ESP.
Функция стабилизации прицепа активируется при следующих условиях:
- ESP активирован и необходимое программное обеспечение разблокировано;
- автопоезд движется со скоростью выше определенного минимального значения;
- на некоторых моделях автомобилей блок управления ABS / ESP распознает наличие буксируемого прицепа через вставленную розетку.
ESP получает информацию о наличии прицепа по шине CAN от блока идентификации прицепа. При выполнении этих условий в блоке управления ABS / ESP активируется соответствующая программа стабилизации автопоезда.
3. Датчики системы курсовой устойчивости автомобиля
В дополнение к датчикам, используемым в системе ABS, в интегрированной системе управления динамикой транспортного средства, например, в системе, объединяющей коробку передач, рулевое управление и систему устойчивости подвески, используется датчик угла поворота рулевого колеса, датчик бокового ускорения и датчик скорости рыскания).
Датчик угла поворота рулевого колеса (рис. 8).
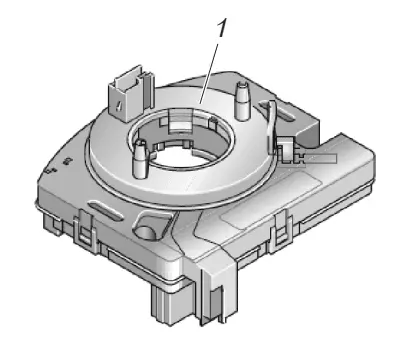
Рис. 8. Датчик угла поворота рулевого колеса: 1 — предохранительное кольцо с часовой пружиной для подушек безопасности
это один из широко используемых датчиков положения в электронных системах транспортных средств, таких как:
- система курсовой устойчивости;
- адаптивный круиз-контроль;
- система помощи при выходе из полосы движения;
- электрогидравлический усилитель руля (EGUR);
- электромеханический усилитель руля (ЭУР);
- система активного рулевого управления (Active Front Steering, AFS);
- система адаптивного освещения;
- активная подвеска.
В отличие от других датчиков, датчик угла поворота рулевого колеса определяет угловое перемещение в широком диапазоне (более 720 ° в каждом направлении или четыре полных оборота рулевого колеса). Датчик устанавливается на рулевой колонке между переключателем и рулем, реже на рулевом механизме. При включении зажигания датчик срабатывает при первом повороте руля на 4,5 °, что соответствует перемещению по окружности руля на 1,5 см.
Датчик угла поворота рулевого колеса используется для определения угла поворота (относительный угол), направления поворота (абсолютный угол) и угловой скорости рулевого колеса. Перечень функций определяется потребностями конкретной системы автомобиля. Таким образом, направление движения, заданное водителем, определяется датчиком угла поворота рулевого колеса.
Подобно этому датчику, используются разные типы устройств, построенные на разных физических принципах измерения: потенциометрические, оптические и магниторезистивные.
Потенциометрический датчик относится к контактным датчикам (рис. 9) и включает в себя два потенциометра, закрепленных на рулевой колонке. Один потенциометр смещен относительно другого на 90 °, что дает возможность определять относительный и абсолютный углы поворота руля (направление вращения). Изменение сопротивления потенциометра пропорционально углу поворота. Из-за низкой надежности, связанной с наличием подвижных контактов, потенциометрические датчики рулевого управления сегодня практически не используются.
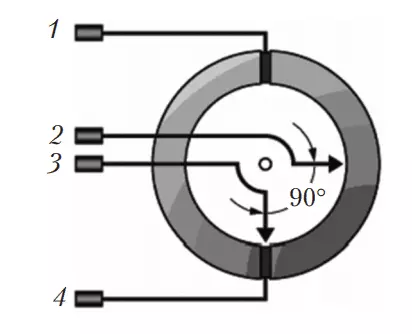
Рис. 9. Потенциометрический датчик угла поворота рулевого колеса: 1 — опорное напряжение; 2, 3 — натяжение на первом и втором скользящих контактах; 4 — «масса»
Более совершенное сенсорное устройство — это бесконтактный оптический сенсор. Комбинируют кодирующий диск 2 (фиг. 10), источники света (светодиод 6 и световод 1), светочувствительные элементы (линейная камера 5), блок определения полных оборотов (карта с электронной обработкой 4).
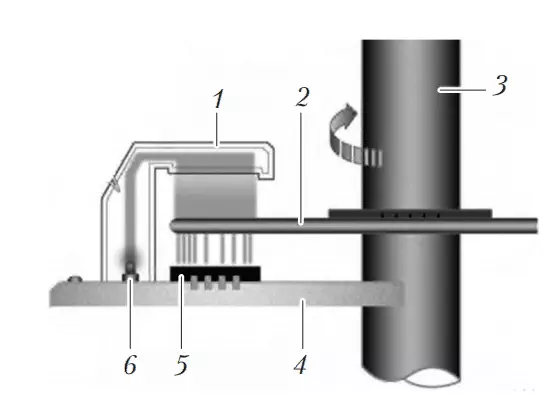
Рис. 10. Оптический датчик угла поворота руля: 1 — световод; 2 — кодирующий диск; 3 — рулевая колонка; 4 — плата с электронным блоком обработки; 5-строчная камера; 6 — светодиод
Кодирующий диск 2 жестко закреплен на рулевой колонке и имеет два сегментированных кольца, одно внутреннее и одно внешнее. На внутреннем кольце прямоугольные отверстия размещены равномерно по окружности, на внешнем кольце отверстия расположены неравномерно. Конструкция внутреннего кольца позволяет определять угол поворота. Наружное кольцо используется для оценки направления вращения рулевого колеса в данный момент.
Через световод 1 светодиод 6 проецирует свет на кодирующий диск 2.
В зависимости от положения рулевого колеса большее или меньшее количество света попадает в линейную камеру через кодирующий диск.
Линейная камера 5 записывает этот оптический сигнал и преобразует его в электрический. На основе импульсов напряжения ЭБУ вычисляет угол и направление рулевого колеса. Путь прохождения сигнала: светодиод — световод — кодирующий диск — линейная камера — аналоговый сигнал — электронный блок обработки данных.
Магниторезистивный датчик (рис. 11) более универсален, поскольку, помимо относительного и абсолютного угла поворота руля, позволяет определять его угловую скорость. Конструктивно датчик содержит два магниторезистивных элемента 2, закрепленных в корпусе датчика. Магниторезисторы взаимодействуют с двумя движущимися магнитами 7.
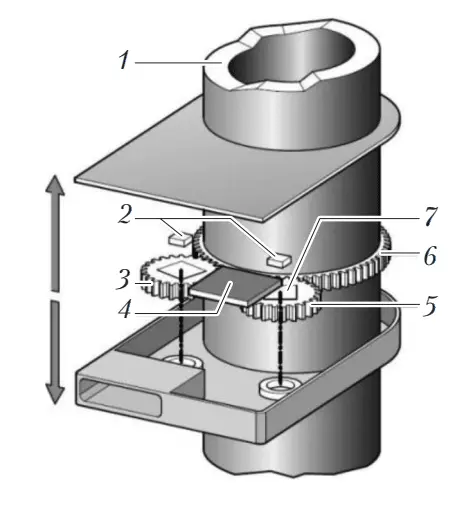
Рис. 11. Магниторезистивный датчик угла поворота рулевого колеса: 1 — рулевая колонка; 2 — элементы магниторезистивного датчика; 3 — измерительная шестерня с зубьями m; 4 — электронная плата; 5 — измерительная шестерня с m = 1 зубьями; 6 — ведущая шестерня; 7 — постоянные магниты
Основным элементом датчика является тонкопленочный магниторезистор гигантского магниторезистора (GMR) или анизотропного магниторезистора (AMR). Каждый из магнитов вращается с помощью зубчатой передачи. Ведущие шестерни имеют разное количество зубцов, которые отличаются на один. Замеры основаны на том, что для каждого положения руля существует свое положение магнитов, которые фиксируются магниторезисторами. Исходя из этого, ЭБУ определяет значение угла поворота, его направление и скорость.
Датчик бокового ускорения. Это элемент на плате интегрального датчика. В упрощенном виде конструкцию датчика можно представить в виде подвешенной в центре подвижной массы 4 с прикрепленной к ней упругой пластиной 5 (рис. 12).
Масса способна двигаться в одном направлении в обоих направлениях. Две другие неподвижные пластины конденсатора 3 и 7 окружают пластины, соединенные с подвижной массой. Таким образом, получаются два последовательно соединенных конденсатора К1 и К2. Их емкости C1 и C2 можно измерить и сравнить на электродах.
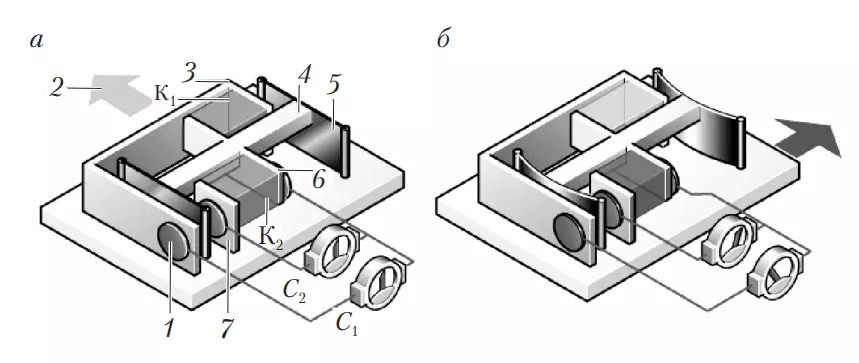
Рис. 12. Датчик бокового ускорения: а — нет ускорения; б — наличие ускорений; 1 — электрод; 2 — направление движения автомобиля; 3, 7 — обкладки конденсатора постоянной емкости; 4 — подвижная масса; 5 — тарелка пружины; 6 — пластина конденсатора на движущейся массе; К1, К2 — конденсаторы; С1, С2 — емкость конденсаторов
При отсутствии разгона заряд конденсаторов такой же. Как только произойдет поперечное ускорение, масса за счет инерции будет перемещаться относительно неподвижных пластин в направлении, противоположном ускорению. Изменение расстояния между пластинами конденсаторов приводит к изменению их емкостей. В этом примере расстояние между пластинами конденсатора K1 больше, чем между пластинами конденсатора K2, поэтому емкость C1 меньше. Емкость C2 больше, так как расстояние между пластинами конденсатора K2 меньше.
Датчик рыскания (скорость рыскания). Расположен в дополнение к датчику поперечного ускорения на печатной плате (рис. 13). Принцип работы датчика следующий. Колеблющаяся масса 6 подвешена в поле постоянного магнита между южным 2 и северным полюсами 4. Печатные проводники 5 объединены с колеблющейся массой, которая фактически является датчиком. Если приложить переменное напряжение U, движущаяся масса с формованными проводниками начнет колебаться в магнитном поле. Когда происходит угловое ускорение, будет отклонение от прямолинейного колебательного движения, так как будет ускорение от силы Кориолиса.
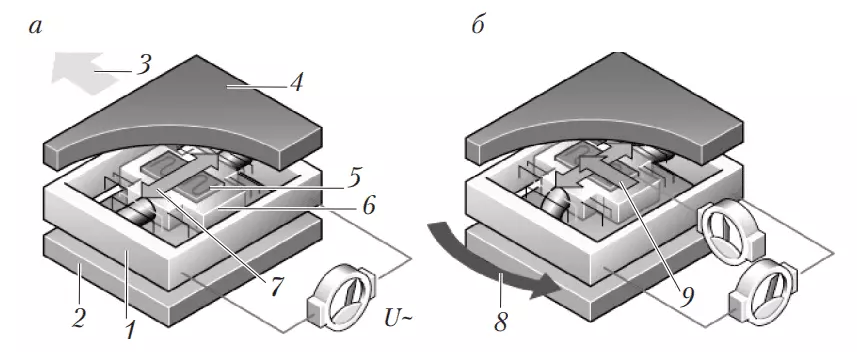
Рис. 13. Датчик рыскания (угловой скорости): 1 — суппорт; 2 — южный полюс; 3 — направление движения; 4 — северный полюс; 5 — печатные проводники; 6 — качающийся груз; 7 — прямолинейная вибрация под действием переменного напряжения; 8 — угловая скорость; 9 — ускорение в результате действия силы Кориолиса; а — прямолинейное движение; б — движение с угловым ускорением







